
Leonardo, es un robot bípedo creado por investigadores del equipo del Centro de Tecnologías y Sistemas Autónomos (CAST) de Caltech, el cual es capaz de volar andar en patineta y caminar por una cuerda floja, siendo el primer robot que utiliza patas articuladas y propulsores de tipo hélices para lograr un fino grado de control sobre su equipo.
Su nombre, Leonardo es una abreviatura de "Legs Onboard Drone", que podría traducirse como "piernas a bordo de un dron". Muchos dirían que es en parte un robot que camina y por otro lado un dron volador.
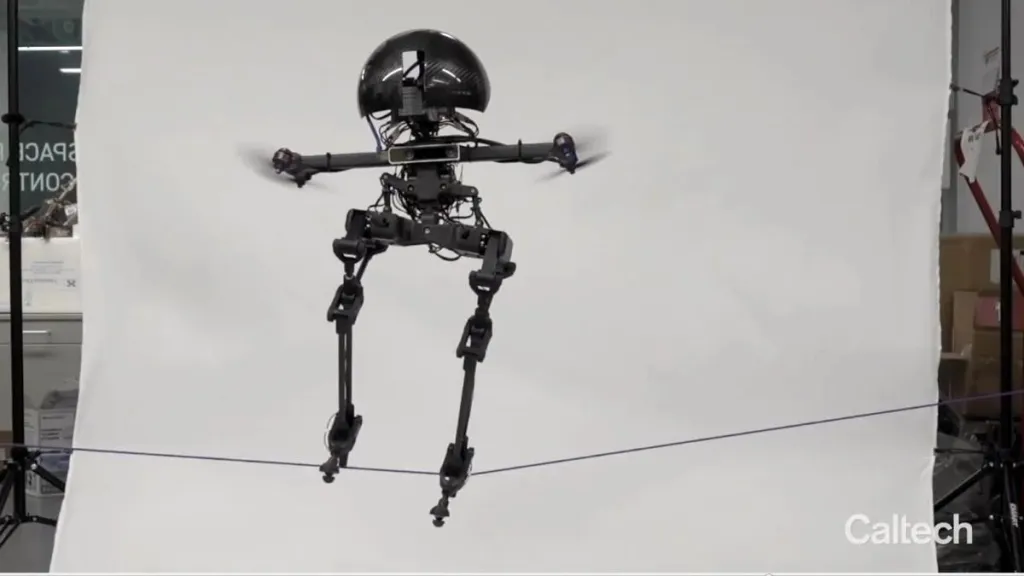
"Según los tipos de obstáculos que necesita atravesar, LEO puede elegir entre caminar o volar, o combinar los dos según sea necesario. Además, LEO es capaz de realizar maniobras de locomoción inusuales que incluso en humanos requieren un dominio del equilibrio. Como caminar en un slackline y andar en patineta ", dice Patrick Spieler, coautor principal del artículo de Science Robotics y ex miembro del grupo de Chung que actualmente trabaja en el Jet Propulsion Laboratory, que es administrado por Caltech para la NASA.
LEO posee un peso de 2,58 kg y mide 76 cm de altura, se encuentra equipado con dos patas, tres articulaciones de transmisión y cuatro hélices montadas en sus hombros en ángulo.
Los robots bípedos pueden usar los mismos tipos de acciones que los humanos realizan para lidiar con terrenos complejos del mundo real, cómo saltar, correr e incluso subir escaleras, pero se ven obstaculizados por terrenos accidentados.
"...LEO tiene como objetivo cerrar la brecha entre los dos dominios dispares de locomoción aérea y bípeda qué normalmente no se entrelazan en los sistemas robóticos existentes " dice en un comunicado Kyunam Kim, investigador posdoctoral en Caltech y coautor principal del artículo de Science Robotics.
Las piernas ligeras de LEO eliminan la atención de sus propulsores al soportar la mayor parte del peso, pero debido a que los propulsores se controlan sincrónicamente con las articulaciones de las piernas, logra tener un equilibrio asombroso.
"Nos inspiramos en la naturaleza. Piense en la forma en que las aves pueden aletear y saltar para navegar por las líneas telefónicas", dice Soon-Jo Chung, autor correspondiente y profesor Bren de Aeroespacial y Control de Sistemas Dinámicos. "Un comportamiento complejo pero intrigante ocurre cuando las aves se mueven entre caminar y volar. Queríamos entender y aprender de eso".
En el mundo real, la tecnología diseñada para LEO podría fomentar el desarrollo de sistemas de tren de aterrizaje adaptativos compuestos por articulaciones de piernas controladas para robots aéreos y otros tipos de vehículos voladores.
El equipo prevé que un futuro helicóptero de Marte podría estar equipado con un tren de aterrizaje con patas para que su equilibrio corporal se pueda mantener mientras aterrizan en terrenos inclinados o irregulares, reduciendo así el riesgo de fallas en condiciones de aterrizaje desafiantes.
Los investigadores planean equipar a LEO con un algoritmo de control de aterrizaje de drones recientemente desarrollado que utiliza redes neuronales profundas. Con una mejor comprensión del medio ambiente, LEO podría tomar sus propias decisiones sobre la mejor combinación de caminar, volar o movimiento híbrido que debería usar para moverse de un lugar a otro basándose en lo que es más seguro y lo que usa la menor cantidad de energía.